|
CMSIS-RTOS2
Version 2.1.3
Real-Time Operating System: API and RTX Reference Implementation
|
|
CMSIS-RTOS2
Version 2.1.3
Real-Time Operating System: API and RTX Reference Implementation
|
CMSIS-RTOS2 is a generic API that is agnostic of the underlying RTOS kernel. Application programmers call CMSIS-RTOS2 API functions in the user code to ensure maximum portability from one RTOS to another. Middleware using CMSIS-RTOS2 API takes advantages of this approach by avoiding unnecessary porting efforts.
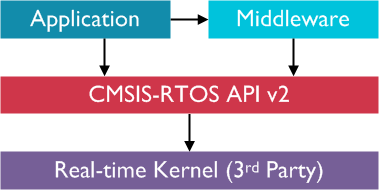
A typical CMSIS-RTOS2 API implementation interfaces to an existing real-time kernel. The CMSIS-RTOS2 API provides the following attributes and functionalities:
The CMSIS-RTOS2 API is designed to optionally incorporate multi-processor systems and/or access protection via the Cortex-M Memory Protection Unit (MPU).
In some RTOS implementations threads may execute on different processors, thus message queues may reside in shared memory resources.
The CMSIS-RTOS2 API encourages the software industry to evolve existing RTOS implementations. RTOS implementations can be different and optimized in various aspects towards the Cortex-M processors. Optional features may be for example
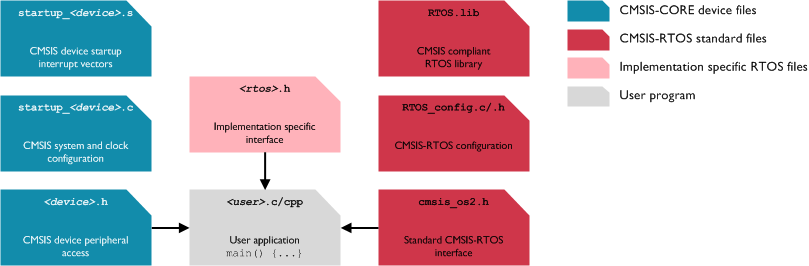
The file cmsis_os2.h is a standard header file that interfaces to every CMSIS-RTOS2 compliant real-time operating systems (RTOS). Each implementation is provided the same cmsis_os2.h which defines the interface to the CMSIS-RTOS C API v2.
Using the cmsis_os2.h along with dynamic object allocation allows to create source code or libraries that require no modifications when using on a different CMSIS-RTOS2 implementation.
A CMSIS-RTOS2 component may be provided as library or source code (the picture below shows a library). A CMSIS-based application is extended with RTOS functionality by adding a CMSIS-RTOS2 component (and typically some configuration files). The cmsis_os2.h header file gives access to RTOS API functions and is the only interface header required when dynamic object allocation is used. This enables portable application that works with every RTOS kernel event without re-compilation of the source code when the kernel is changed.
Static object allocation requires access to RTOS object control block definitions. An implementation specific header file (rtos.h in the picture below) provides access to such definitions. The section For RTX v5 these definitions are provided in the header file rtx_os.h that contains this definitions for RTX v5.
Once the files are added to a project, the user can start working with the CMSIS-RTOS functions. A code example is provided below:
Code Example

